
风光互补发电系统实训系统使用说明
105页
1、 KNT-WP01 风光互补发电系统实训风光互补发电系统实训系统系统 使用说明使用说明 南京康尼科技实业有限公司 2 目录目录 第一章第一章 充电控制器的组成及工作原理充电控制器的组成及工作原理 . 3 1.1 控制器对蓄电池的充放电控制 3 1.2 充电控制单元结构 7 1.3 实验波形 . 11 第二章第二章 逆变器逆变器 14 2.1、概述 14 2.2、逆变器的定义及分类 14 2.3、现代逆变技术的发展趋势 14 2.4、逆变基本原理 16 2.5、WPV02 型风光互补实训系统逆变器 17 第三章第三章 数字信号处理器(数字信号处理器(DSPDSP)的基本原理)的基本原理 . 36 3.1 DSP 概念 36 3.2 DSP 的特点 36 3.3 TMS320F2812 的主要性能及资源 . 36 3.4 TMS320F2812 的引脚分布及引脚功能 . 39 3.5 TMS320F2812 的硬件设计 . 48 第四章第四章 DSP 开发环境开发环境 CCS3.3 52 4.1 CCS3.3 的安装 . 52 4.1 安装仿真器 . 56 4.3 配置 CCS3.3 Se
2、tup . 60 4.4 CCS3.3 编程介绍 62 4.5 控制器部分源代码 69 第五章第五章 监控系统监控系统 82 5.1 概述 . 82 5.2 接线定义 . 82 5.3 接线方式 . 82 5.4 通讯设置 . 83 附录附录 A 新能源新能源系统控制板卡系统控制板卡 ModbusModbus 通讯协议通讯协议 84 附录附录 B 端子排定义以及板卡接线图端子排定义以及板卡接线图 . 88 附录附录 C 力控与西门子力控与西门子 420420 变频器通讯设置变频器通讯设置 . 96 附录附录 D 更改过图表更改过图表 . 100 3 第第一一章章 充电控制器的组成及工作原理充电控制器的组成及工作原理 1.1 控制器控制器对蓄电池的充放电控制对蓄电池的充放电控制 1.1.1 太阳能光伏电池最大功率点跟踪太阳能光伏电池最大功率点跟踪 光伏阵列输出特性具有非线性特征,并且其输出受太阳辐照度、环境温度负载情况影 响。 只有在某一输出电压值时, 光伏阵列的输出功率才能达到最大值这时光伏阵列的工作点 就达到了输出功率电压曲线的最高点, 称之为最大功率点。 由于目前光伏电池的光电转换
3、效 率比较低, 为了有效利用光伏电池, 对光伏发电进行最大功率跟踪 (the Maximum Power Point Tracking,MPPT)显得非常重要。目前,国内外文献提出的多种跟踪方法其实质上是一个 寻优过程, 即通过太阳能电池端电压来控制最大功率的输出。 太阳能电池阵列的输出功率特 性曲线如图 1-1 所示。 图1-1光伏电池输出功率特性 由图可知,当太阳能电池工作于最大功率点 Vmax 左侧时,其输出功率随电池端电压 的上升而增加;当太阳能电池工作与最大功率点电压 Vmax 右侧时,其输出功率随电池端电 压的上升而减少。此外,MPPT 控制也可以先根据采集到的太阳能电压电流值以及功率值来 判断其运行在那个工作区,然后根据不通的工作区采取不同的工作指令进行跟踪控制。 由于光伏阵列的最大功率点是一个时变量,因此可以采用搜索算法进行最大功率点跟 踪。其搜索算法可分为非自寻优和自寻优两别。所谓非自寻优算法是根据外界环境因素(如 光照和温度)的变化,利用数学型或表方法确定最大功率点。该方法在实际中很少采用,本 文不进行详述。 自寻优算是不直接检测外界环境因素的变化, 而是通过直接测
4、量得到的电信 号,判断最大率点的位置,从而进行追踪。目前文献己提出的自寻优算法主要包括扰动观察 法增量电导法、恒定电压法、短路电流法以及基于爬山法或扰动观测法的改进自适应算法。 恒压跟踪法(Constant Voltage Tracking,CVT) :分析图 1-1 可以看出,在日照强度 较高时, 诸条曲线的最大功率点几乎分布于一条垂直线的两侧, 这说明阵列的最大功率输出 点大致对应于某个恒定电压, 这就大大简化了系统 MPPT 的控制设计, 即人们仅需从生产厂 商处获得 Vm 数据并使阵列的输出电压钳位于 Vm 值即可,实际上是把 MPPT 控制简化为稳压 控制,这就构成了 CVT 式的 MPPT 控制。采用 CVT 较之不带 CVT 的工作方式要有利得多, 对于一般光伏系统可望获得多至 20%的电能。CVT 控制的优点是: 4 1. 控制简单,易实现,可靠性高; 2. 系统不会出现振荡,有很好的稳定性; 3. 可以方便地通过硬件实现。 但是这种跟踪方式忽略了温度对阵列开路电压的影响, 在早晚和四季温差变化剧烈的情况下 功率损失会很大,且必须有人工干预才能良好运行,实际上 CVT
《风光互补发电系统实训系统使用说明》由会员第***分享,可在线阅读,更多相关《风光互补发电系统实训系统使用说明》请在金锄头文库上搜索。
校园足球汇报
异甘草酸镁注射液【治疗急性药物性肝损伤】Ⅱ期临床研究总结
云教室课程行政伦理学行政良心

语文S版小学二年级语文下册诺亚方舟课件优质课教学课件
未来中考趋势作文考与练
近年来广东历史试题中考易错点分析与教学启示

搜索推广那些事

小学语文二年级上册红领巾真好说课稿设计(说课设计)

新课标人教版二年级语文上册红领巾真好课件

新课程背景下的高中化学课堂教学改革

危机管理与突发事件应对

背影朱自清教案课件二课时
突发公共卫生事件培训
统计学简史及数据科学中南财经大学

水泥混凝土路面技术现状及发展终
有家真好作文讲评课
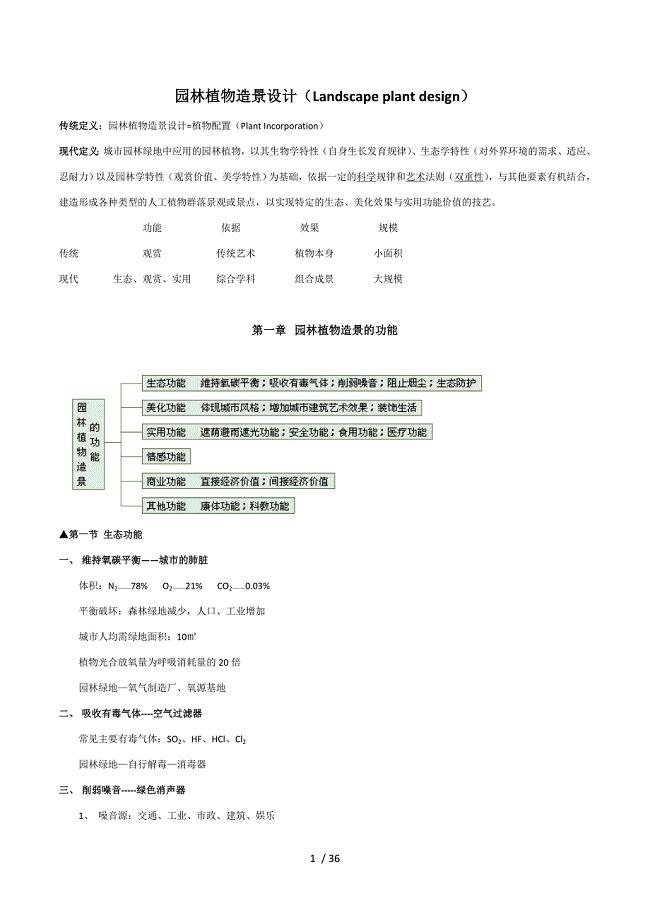
西南大学植物造景设计总复习
海外汉语教学新探索在线交流学习平台Goclef

动态黑色背景年终总结模板
孙子的治军之道与现代管理谋略总结
 202_年新员工培训总结范文
202_年新员工培训总结范文
2023-02-08 3页
2023年玉龙镇城乡环境综合治理工作总结
2022-11-03 10页
2022比赛演讲稿:我与企业共命运
2024-02-26 3页
小学生活老师工作随笔
2023-05-01 3页
2023年我喜欢的 教案:《氓.》教学设计一等奖
2023-09-20 10页
财务共享高校会计学专业课程改革
2023-04-08 6页
厨师年终总结的范文厨师年终总结个人
2023-10-18 3页
2022清明节主题诗歌征文
2023-05-26 10页
2022年幼儿园大班下学期个人工作计划文档五篇精选
2023-02-05 19页
小学数学式与方程
2022-08-02 8页