
载运工具运用工程专业优秀论文摆式列车线路信息检测系统关键技术研究
34页
1、载运工具运用工程专业优秀论文载运工具运用工程专业优秀论文 摆式列车线路信息检测系统关键摆式列车线路信息检测系统关键技术研究技术研究关键词:摆式列车关键词:摆式列车 倾摆控制倾摆控制 车辆测试车辆测试 陀螺平台陀螺平台 位移传感器位移传感器摘要:开行摆式列车是实现既有线路提速的一种有效措施。本文结合我国首列 国产摆式列车的研制工作展开。主要对摆式列车线路信息检测系统及其信号处 理方法进行研究,以期建立有效的检测系统和方法,为摆式列车倾摆控制提供 及时、准确、可靠的检测信息。 为了实现摆式列车的倾摆控制,必须实时检 测列车通过曲线时的相关运行参数,关键是获得列车通过曲线时的未平衡离心 加速度信号,据此产生倾摆控制指令。针对目前国内外摆式列车线路信息检测 系统存在的主要问题(加速度信号经滤波后产生延时),在国内首次提出了基于 单轴陀螺平台的摆式列车线路信息检测方法和基于“数学平台”的摆式列车线 路信息检测方法。理论分析和线路试验都表明这两种检测方法能有效克服加速 度信号滤波延时的问题,可为倾摆控制及时、准确、可靠地提供检测信息。 基于单轴陀螺平台的摆式列车线路信息检测系统,利用安装在头车车体
2、地板上 的单轴陀螺平台和车体与悬挂系统之间的两个位移传感器建立测量的水平基准 线,不仅可测量出列车通过曲线时线路的超高值,而且可测量出曲线曲率值。 利用所测线路参数经计算便可得到摆式列车倾摆控制所需未平衡离心加速度的 大小,为倾摆控制提供指令信息。论文详细分析了其测量原理、测量误差并建 立了相应的数学模型。线路试验表明该方法能满足摆式列车倾摆控制实时性的 要求。 基于单轴陀螺平台的摆式列车线路信息检测方法是建立在陀螺平台系 统具有良好的动态特性的基础之上。论文首先利用最小二乘法及其改进算法建 立了描述陀螺平台系统动态特性的差分数学模型,并对其动态特性进行了分析。 然后在此基础上,采用零极点匹配法设计了相应的动态补偿数字滤波器,并对 基于神经网络的动态补偿方法进行了研究,设计了相应的神经网络动态补偿器。 通过对陀螺平台线路实测超高信号进行补偿处理,获得满意的效果。 为了提 高检测系统可靠性,降低成本,论文首次把“数学平台”的概念引入到摆式列 车的研究中。建立了“数学平台”系统的数学模型;并根据刚体定点转动的基 本理论建立了姿态、位置解算的数学模型,对摆式列车通过曲线时的姿态、位 置解算问
3、题进行了全面深入的研究;详细分析了摆式列车通过曲线时的圆锥运 动效应及其对姿态解算的影响;研究了圆锥误差补偿的“多子样”算法。仿真 计算表明采用该补偿算法能有效提高摆式列车姿态、位置解算精度,确保列车 正确倾摆。 基于“数学平台”的摆式列车线路信息检测方法,由于积分运算, 传感器测量误差将引起显著的随时间逐渐累积的姿态、位置计算误差。消除和 削弱该项误差的影响是“数学平台”检测系统在摆式列车中成功应用的关键。 论文采用基于卡尔曼滤波的动态误差补偿方法对“数学平台”系统误差进行了 补偿研究。通过对“数学平台”检测系统的各种误差因素进行详细分析,建立 起完整的误差数学模型。状态变量的可观测性和可观测度直接决定了卡尔曼滤 波器状态估计的效果。论文基于 PCWS 可观测性分析方法和 SVD 可观测度分析方 法,详细分析了列车运动机动性对可观测性和可观测度的影响,并对外部观测 量的选取对卡尔曼滤波效果的影响进行了分析、讨论。考虑传感器测量误差和 实际线路激扰对卡尔曼滤波的影响,为了增强算法对噪声和模型不确定性的鲁棒性,论文还研究并提出一种能同时估计模型参数和状态变量的新的卡尔曼滤 波算法。最后,
4、通过仿真计算,验证了该动态误差补偿方法的有效性。 为消 除由于轨道不平顺等因素所带来的随机振动干扰对传感器信号的影响,论文研 究了一种基于卡尔曼滤波理论的动态自适应滤波算法,该法把非平稳随机信号 模型参数和噪声统计特性的实时估计与卡尔曼滤波算法结合起来,能实现摆式 列车线路检测信号的有效滤波处理,减小振动干扰噪声等误差因素对测量结果 的影响。这种基于卡尔曼滤波理论的自适应滤波算法要求已知信号的参数模型, 且其实时建模精度是影响动态滤波效果的关键。论文针对非平稳随机信号 AR 模 型的实时建模理论和方法进行了深入研究,研究了多种非平稳随机信号的实时 建模方法并对之进行分析比较。理论分析和仿真计算表明,时变参数差分模型- RLSAF 算法、状态空间模型一带时变渐消因子的卡尔曼滤波算法对非平稳随机 信号具有很强的跟踪性能,是实现非平稳随机信号实时建模的两种有效的算法。最后建立了摆式列车线路信息检测系统,并进行了相应的线路试验。通过对 试验数据的分析,表明论文所提出的两种线路信息检测方法能满足摆式列车倾 摆控制的要求。正文内容正文内容开行摆式列车是实现既有线路提速的一种有效措施。本文结合我国首
《载运工具运用工程专业优秀论文摆式列车线路信息检测系统关键技术研究》由会员cjc****537分享,可在线阅读,更多相关《载运工具运用工程专业优秀论文摆式列车线路信息检测系统关键技术研究》请在金锄头文库上搜索。
城乡居民健康 档 案管理
中国近现代史纲要习题册2018.12 - 副本(一)

中 国 共 产 党入党积极分子考察表

华为的成功之路对我国企业的启示

惩罚犯罪与保障人 权的关系

人脸识别99%准确率背后的秘密
孔子思想的对国外的影 响 力
幼儿园 档 案管理

从网络直播和传统行业结合行业发展趋势分析网络主播未来生存发展之路
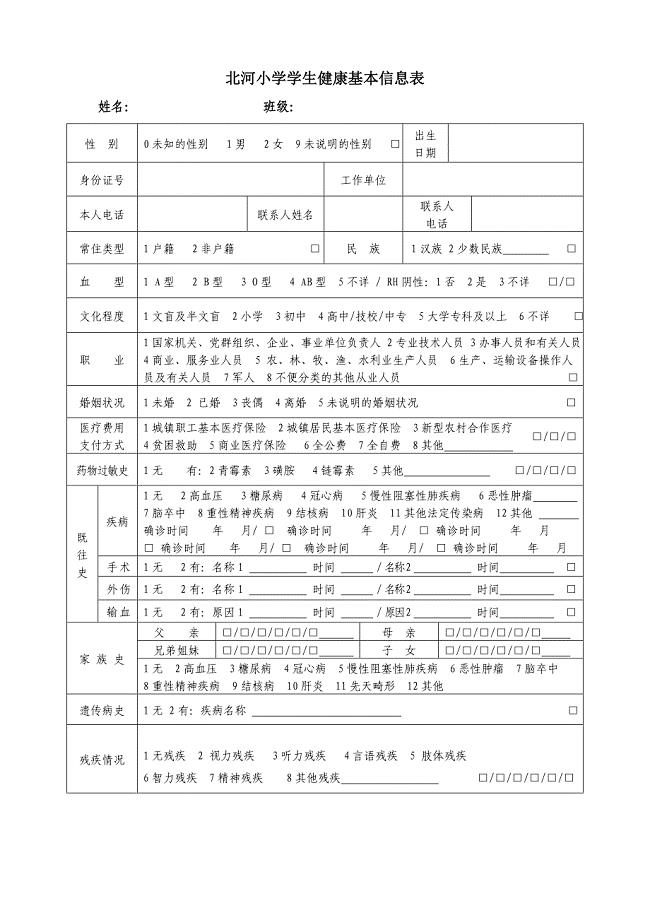
学生健康 档 案个人基本信息表
关于红 军长征的故事10个完整版

奇迹技术S12服务端经验倍率修改

一个很短的故事 海明威 翻译
《影 响 力从语言开始》作业及考试

我国土壤污染现状与防控策略

提高教师执教能力三 部 曲

《十六年前的回 忆》 重点问题探究

前诉裁判对后诉的影响——《民诉法解释》第93条、第247条解析

从《巴黎圣母院》感悟美与丑的真谛

三国演义常识题
 经济学名词(中英文对照)
经济学名词(中英文对照)
2024-04-03 10页
宏观经济学 复习重点
2024-04-03 6页
经济学常识重点、难点汇总
2024-04-03 14页
华为财务管理(6版)(6)
2024-02-24 281页
高校经济学专业参考资料 马工程版宏观经济学第一章知识点
2024-02-01 1页
国家电网装表接电选择题
2024-02-01 171页
第五次全国经济普查表(可编辑版)
2024-01-23 18页
土地平整方案
2023-12-27 62页
圆周率1000000位-完整版
2023-12-27 112页
国家电网有限公司十八项电网重大反事故措施(修订版)-2018版(word文档良心出品)
2023-12-27 208页