
东南大学机械原理课件
272页
1、第二章 平面连杆机构及其设计,二、连杆机构的分类1、根据构件之间的相对运动分为:平面连杆机构,空间连杆机构。2、根据机构中构件数目分为:四杆机构、五杆机构、六杆机构等。,一、连杆机构是若干个构件全用低副(转动副、移动副、球面副、球销副、圆柱副及螺旋副)联接而成的机构,也称之为低副机构。,三平面连杆机构的特点,1)适用于传递较大的动力,常用于动力机械。2)依靠运动副元素的几何形面保持构件间的相互接触,且易于制造,易于保证所要求的制造精度3)能够实现多种运动轨迹曲线和运动规律,工程上常用来作为直接完成某种轨迹要求的执行机构。4)可实现远距离传递的操纵机构。,不足之处:1)不易于传递高速运动。2)可能产生较大的运动累积误差。3)平面连杆机构的设计较为繁难。,2-1 平面四杆机构的基本形式、演变及其应用,在连架杆中,能绕其轴线回转360者称为曲柄;仅能绕其轴线往复摆动者称为摇杆。,一、平面四杆机构的基本形式,1)曲柄摇杆机构:两连架杆中,一个为曲柄,而另一个为摇杆。2)双曲柄机构 两连架杆均为曲柄。3)双摇杆机构 两连架杆均为摇杆。,4,1,2,3,2-2 平面四杆机构设计中的共性问题,一、平
2、面四杆机构有曲柄的条件,二、平面四杆机构输出件的急回特性,三、平面机构的压力角和传动角、死点,四、运动的连续性,一、平面四杆机构有曲柄的条件,平面连杆机构有曲柄的条件:1)连架杆与机架中必有一杆为四杆机构中的最短杆;2)最短杆与最长杆之和应小于或等于其余两杆的杆长之和。(杆长和条件),铰链四杆机构类型的判断条件:,2)若不满足杆长和条件,该机构只能是双摇杆机构。注意:铰链四杆机构必须满足四构件组成的封闭多边形条件:最长杆的杆长2 , : t1t2 , v10。,A,B,三、平面机构的压力角和传动角、死点,C,D,F,vc,F1,F2,F1 = FcosF2 = Fsin,1、机构压力角:在不计摩擦力、惯性力和重力的条件下,机构中驱使输出件运动的力的方向线与输出件上受力点的速度方向间所夹的锐角,称为机构压力角,通常用表示。,F1,传动角:压力角的余角。,机构的传动角和压力角作出如下规定:min ;= 3060;max。、分别为许用传动角和许用压力角。,F2,通常用表示., F1,vB3,= 0 = 90,= arccosb2+c2-d2-a2+2adcos/2bc., = 0, min=
3、 arccosb2+c2-(d-a)2/2bc = 180, max= arccosb2+c2-(d+a)2/2bc min=min ,180-maxmin,2、最小传动角的确定,min= =arccos(a+e)/b,为提高机械传动效率,应使其最小传动角处于工作阻力较小的空回行程中。,3 机构的死点位置,在不计构件的重力、惯性力和运动副中的摩擦阻力的条件下,当机构处于传动角=0(或=90)的位置下,无论给机构主动件的驱动力或驱动力矩有多大,均不能使机构运动,这个位置称为机构的死点位置。,F1 = FcosF2 = Fsin,B,F,四、运动的连续性,连杆机构的运动连续性:指该机构在运动中能够连续实现给定的各个位置。,连杆机构的运动不连续的问题:错位不连续;错序不连续。,23、平面四杆机构的运动设计,1、基本问题 根据机构所提出的运动条件,确定机构的运动学尺寸,画出机构运动简图。,1)根据给定的运动规律(位移、速度和加速度)设计四杆机构;,a 实现连杆的几个位置,c 实现两连架杆的对应角位移、角速度和角加速度(颚式碎矿机、惯性筛),b 实现输出构件的急回特性,2)根据给定的运动轨迹设计
《东南大学机械原理课件》由会员壹****1分享,可在线阅读,更多相关《东南大学机械原理课件》请在金锄头文库上搜索。
医院三基考试考试题带答案47
酸油项目建议书写作模板-立项前期
2022春沪教版数学三下4.3《计算器》word教案

2013编辑部实习心得体会范文
细石混凝土地面分项工程质量管理
西北工业大学21春《组成与系统结构》离线作业1辅导答案49
湖北省黄冈市启黄中学2013届九年级物理上学期期末考试试题 新人教版
电力工程监理旁站方案(共12页)
防爆电动单梁桥式起重机技术协议
师德师风演讲稿合集15篇
美容院加盟店创业计划书美容院创业计划书
2013年囷瑶小学教师岗位竞聘方案
剖析政治发展与政治文明
自由现金流量与企业价值研究(第二篇)
金相实验报告
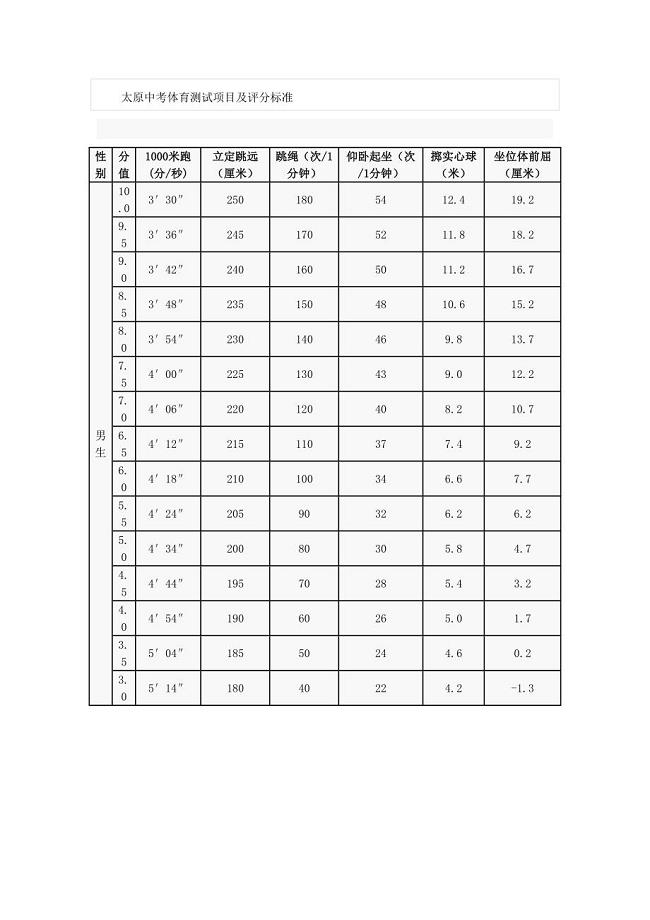
太原中考体育测试项目及评分标准
有关房地产合同范文集合八篇
大学生实习报告汇编九篇
2023部门主管个人工作总结.doc
2023年北京市二龙路医院北京市肛肠医院全日制高校医学类毕业生择优招聘考试历年高频考点试题含答案解析
 中医科运用PDCA循环提高中医特色治疗室消毒合格率PDCA成果汇报
中医科运用PDCA循环提高中医特色治疗室消毒合格率PDCA成果汇报
2021-12-31 51页
核医学科运用PDCA循环优化ECT就诊流程PDCA成果汇报
2021-12-30 11页
放疗科运用PDCA循环提高放射治疗流程中时间节点的医患信息共享达成率PDCA成果汇报
2021-12-30 12页
ICU监护室运用PDCA循环降低导管相关血流感染发生率PDCA成果汇报
2021-12-30 12页
医学装备部运用PDCA循环缩短采购流程提高购置设备速度PDCA成果汇报
2021-12-30 14页
科教部运用PDCA循环提高国家自然科学基金申请人的辅导参与率PDCA成果汇报
2021-12-30 12页
医务科运用PDCA循环基于医院信息系统降低特殊使用级抗菌药物使用率
2021-12-30 29页
麻醉科运用PDCA循环提高麻醉科困难气道插管成功率PDCA成果汇报
2021-12-30 11页
产科运用PDCA循环降低新生儿锁骨骨折发生率
2021-12-30 16页
医院多部门运用PDCA循环提高药房药品账实相符率
2021-12-19 32页
广东省建筑装饰工程竣工验收技术资料统一用表水基防锈剂配方组成比例,防锈原理及配制方法辩论赛宁要大城市一张床,宁要小城镇一间房【2018年整理】动力气象吕美仲课后答案.pdf红楼梦后28回(癸酉本)金锄头网企业认证授权书(负责人非法人必须提供)服装设计助理实习周记制造机械项目投资分析报告(总投资15000万元)(78亩)计算机网络技术基础 教学课件 作者 阚宝朋 课件 第2章 网络体系结构与网络协议计算机网络技术基础 教学课件 作者 阚宝朋 课件 第5章 网络层与网络互联计算机网络技术基础 教学课件 作者 阚宝朋 课件 第1章 网络基础知识输煤管道生产建设项目可行性研究报告